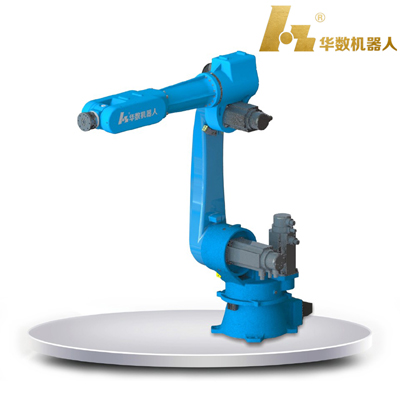
HSR-JR630 industrial robot
HSR-JR630 has the advantages of high precision, high acceleration capability and good rigidity. The repeatability is up to ±0.05mm and the range of motion is up to 1701mm. It can easily cope with the application market of palletizing, assembly, grinding and welding industries.
1. Cost-effective. Low cost, it is a general-purpose industrial robot that can be reprogrammed for other handling and assembly operations and can be recovered in one year.
2. Long life. High-precision and high-rigidity imported reducer can last for several decades, with one investment and many years of benefits.
3. High acceleration performance. Low-speed ratio high-precision reducer with ultra-fast acceleration performance, the fastest acceleration time is up to 0.3S.
4. High integration. The built-in signal line and the air pipe of the main body are plug and play, no need for complicated wiring, and the internal cable has no slip, which can maintain the trouble-free rate for a long time.
5. Ultra high precision. In addition to the precise design, the imported high-precision reducer is used, and repeat positioning accuracy of the end is up to ±0.05mm.
6. High smoothness. The advanced control system and the servo drive system are used to achieve high-speed and smooth motion, and the transition point is almost zero-time pause.
7. High rigidity. After structural optimization, high-power motors and high-quality materials are used to achieve good rigidity.
8. High load capacity. The maximum load of 30kg at the end can easily handle the application in the processing, assembly and welding industries.
Industrial Robot Solution